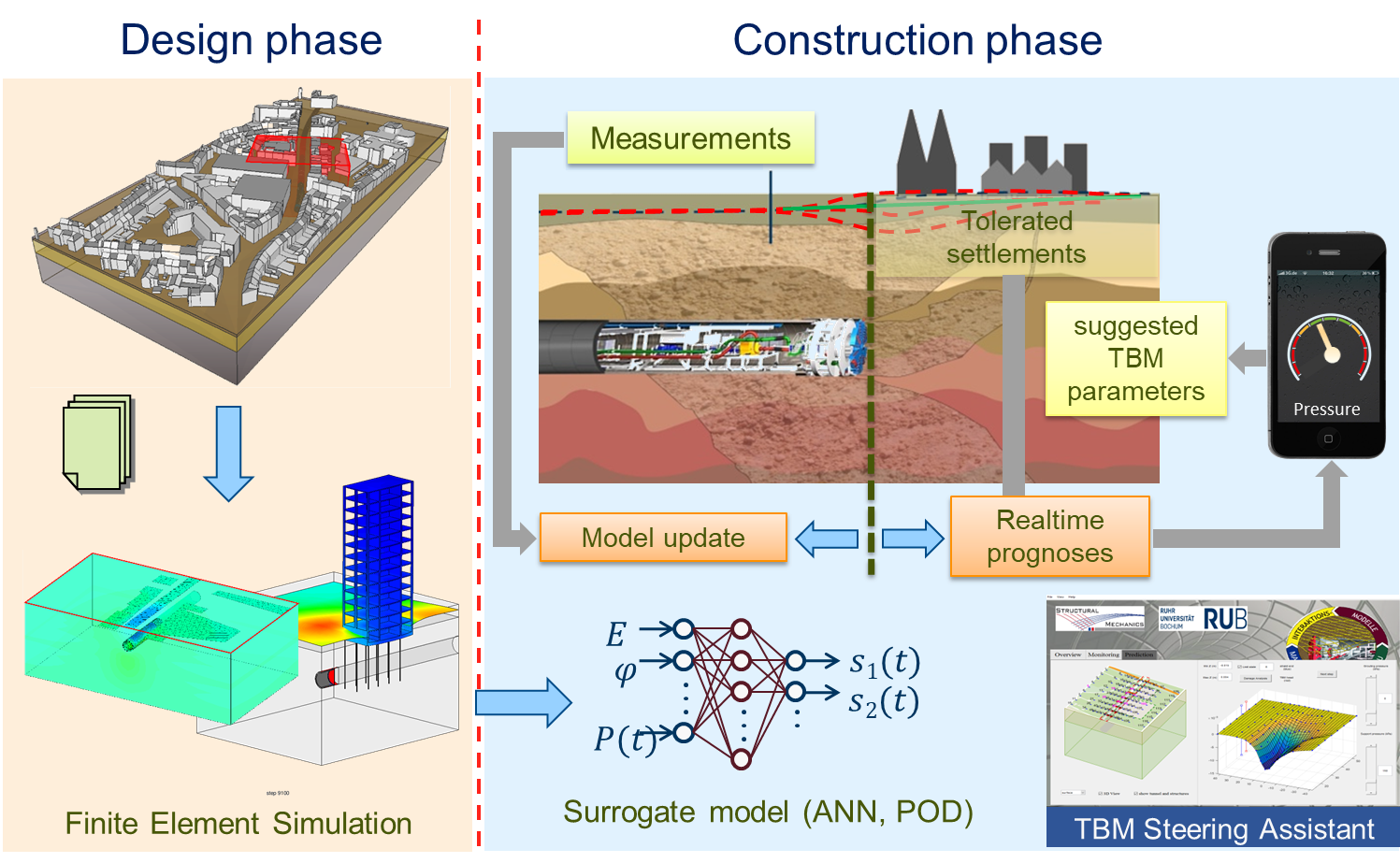
Mechanized tunneling is an efficient tunneling technology for the construction of new underground infrastructures, in particular in urban environments. During the construction process, it is required to reduce the tunneling induced settlements or to avoid that tolerances with respect to settlements, which eventually may result in damage of existing structures, are exceeded. The settlements can be controlled by adjusting the process parameters such as the face support pressure at the tunnel face, the grouting pressure of the grouting material injected into the gap between the tunnel lining and the surrounding soil, and the advance speed during the tunnel advancement [1]. Currently, decisions affecting the steering of tunnel boring machines (TBMs) are based upon engineering expert knowledge and monitoring data. However, using monitoring data implies that information (data) related to already passed situations is used to extrapolate on the future behavior of the soil-tunnel interactions. In the subproject C1 of the Collaborative Research Center SFB 837 “Interaction Modeling in Mechanized Tunneling”, an approach is presented, in which a computational model is used together with available measurement data to support the TBM steering by providing predictions on the expected settlement field in real-time during the construction. Figure 1 presented the proposed concept for TBM steering.
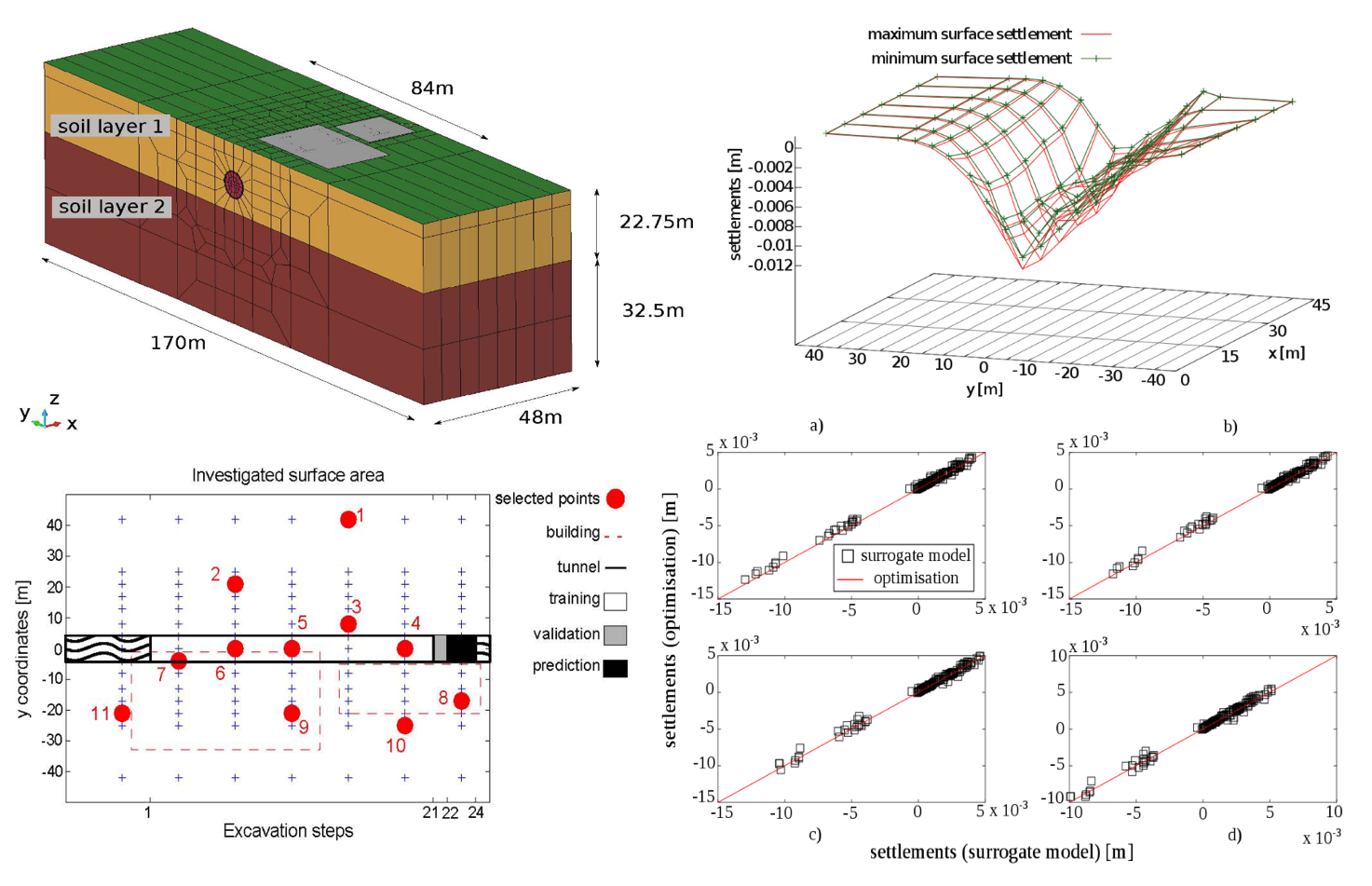
Recently, realistic 3D simulations of the mechanized tunneling process are increasingly required to investigate the interactions between machine-driven tunnel construction and the surrounding soil in order to provide reliable estimates of the expected settlements and associated risks of damage for existing structures, in particular in urban tunneling projects. To accomplish the step from large scale computational analysis to real-time predictions of expected surface settlements during tunnel construction, a numerically efficient hybrid surrogate modeling strategy, combining dimensionality reduction techniques (Proper Orthogonal Decomposition and Non-Negative Matrix Factorization) and Artificial Intelligence (Recurrent Neural Networks) has been proposed [2-4]. Due to the uncertainty arising in mechanized tunneling process, different types of input-output data relationship are included in the surrogate model, such as deterministic, interval, fuzzy or polymorphic uncertain data [3, 4]. In addition, available monitoring data during the tunneling process is possible to be integrated into the surrogate model to maintain the physical behavior and improve the prediction performance of the surrogate model. An application example represented for a tunnel section constructed by shield tunneling is illustrated in Fig. 2 (left). On the top right of Fig. 2 is the upper and lower bounds of the expected surface settlement field considering the uncertainty of the first soil layer as an interval. Figure 2 also shows the prediction accuracy of the employed surrogate models for the real-time purpose through regression plots between predicted and reference values.
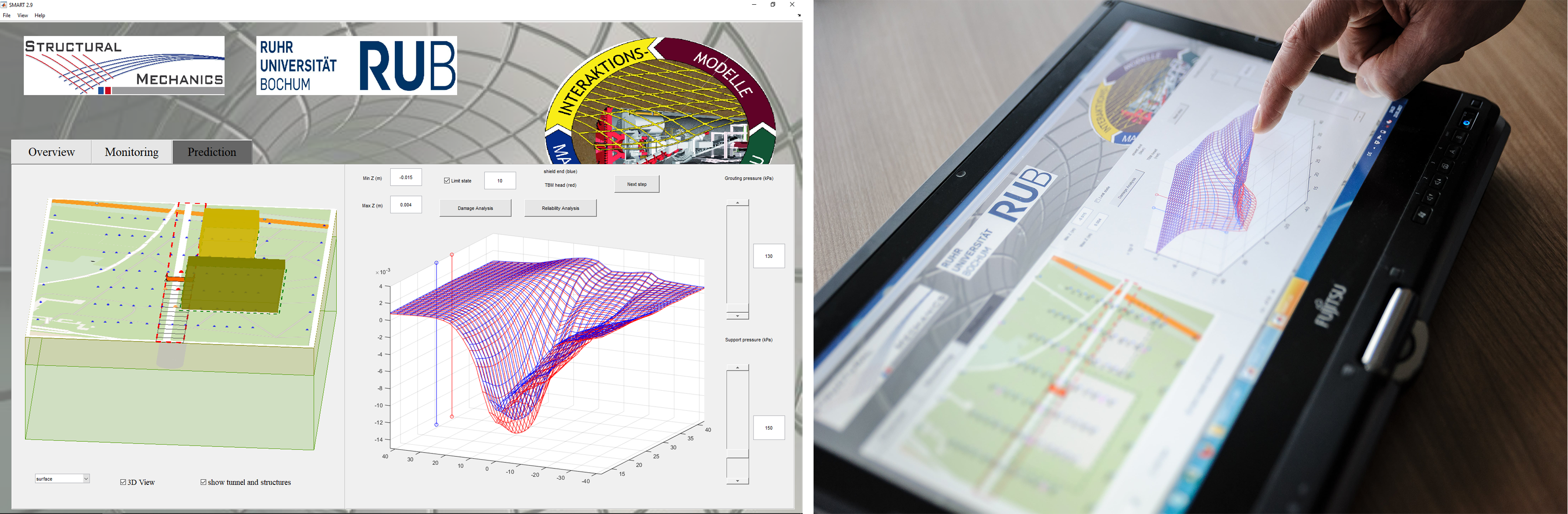
All the developed methods are implemented into a user-friendly application, which can be used as an assistant tool in mechanized tunneling [2]. The results of the numerical simulations form the basis for the development of a Simulation and Monitoring-based Assistant for Real-time steering in mechanized Tunneling (SMART), which is able to produce results quickly and efficiently during the TBM drive. Figure 3 (left) shows a screenshot of the SMART app to demonstrate for the support of TBM steering. The real-time prediction of time variant settlement fields (lower and upper bounds) for user defined face support and grouting pressures allows to select suitable values of the steering parameters during the advance of the TBM, such that tolerated settlements are not exceeded. Further objectives to be incorporated in TBM steering are the tunnel face stability and tolerable risk levels of damage in tunnel linings and existing buildings. Since the installation and execution of SMART does not require any expensive hardware, the application can run in almost every standard laptop or even tablet, see Fig.3 (right).
Dr.-Ing. Ba Trung Cao
ba.cao@rub.de
+49 234 / 32-29056

Chen Xu will present his doctoral theses with the title "Physics Meets Data: Machine Learning Framew
more...